|
Checheng Yu 喻车澄 I'm an 4th year undergraduate student at Nanjing University, majored in Automation in School of Management and Engineering. I'm currently honored to be a research assistant advised by Prof. Lin Shao at National University of Singapore. Recently, my research has focused on foundation model-based embodied AI and robot skill learning 🤖. Previously, I worked with Dr. Yuxiang Sun and Junjie Zhao, studying game agents 🎮 based on reinforcement learning and large models. News[2025] 🎉 Our paper "EMOS: Embodiment-aware Heterogeneous Multi-robot Operating System with LLM Agents" has been accepted by ICLR 2025! [2024] 🙏 I'm looking for 25 fall PhD position in Robotics/RL, please contact me if interested. Email / Scholar / Github / WeChat / CV
×

|

|
ResearchI'm interested in Robotics 🤖, Reinforcement learning 🕹️ and Multi-agent system 👥. Most of my research is about decision-making models in different scenarios. I'm also working to develop embodied AI with efficient policy learning system and lifelong learning capability. Feel free to contact me if you want to work with me. |
|
EMOS: Embodiment-aware Heterogeneous Multi-robot Operating System with LLM Agents Junting Chen*, Checheng Yu*, Xunzhe Zhou*, Tianqi Xu, Yao Mu, Mengkang Hu, Wenqi Shao, Yikai Wang, Guohao Li, Lin Shao International Conference on Learning Representations (ICLR) 2025 website / paper / code In the the real-world robot environment, the capability of the agent in MAS is tied to the physical composition of the robot. To improve the collaboration among heterogeneous robots with varying embodiment capabilities, we introduced a multi-agent framework EMOS combining robot capabilities with task planning. To evaluate how well our MAS performs, we designed Habitat-MAS benchmark, including four tasks: 1) navigation, 2) perception, 3) manipulation, and 4) comprehensive multi-floor object rearrangement. |
|
|
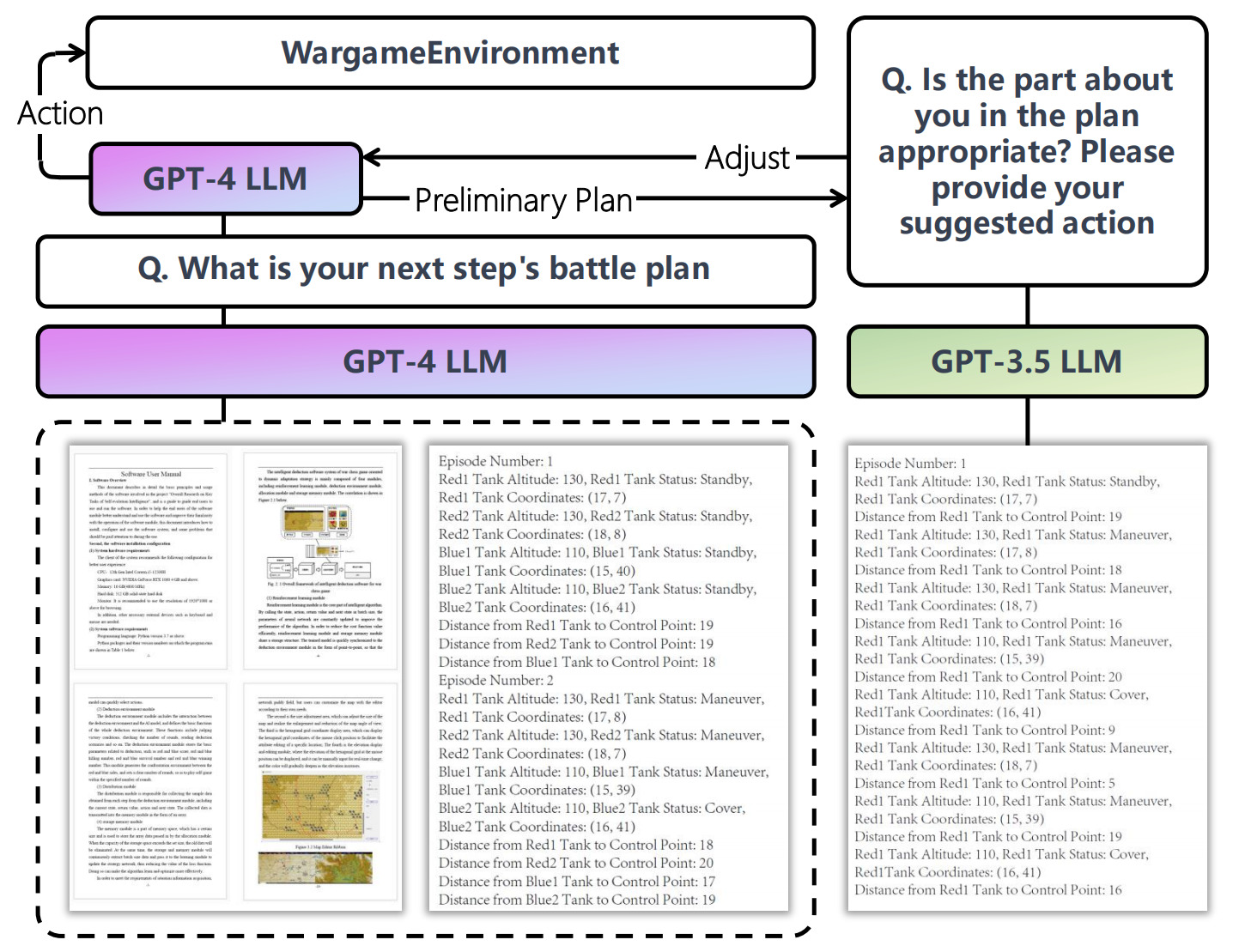
Self Generated Wargame AI: Double Layer Agent Task Planning Based on Large Language Model Yuxiang Sun, Checheng Yu, Junjie Zhao, Wei Wang, Xianzhong Zhou arXiv paper / code We proposes a two-layer agent task planning, issues and executes decision commands through the interaction of natural language, and carries out simulation verification through the wargame simulation environment. Through the game confrontation simulation experiment, the intelligent decision-making ability of the large language model is significantly stronger than the commonly used reinforcement learning AI and rule-based AI. |
Education & Experience |

|
National University of Singapore Singapore, 2024 |

|
Nanjing University Nanjing, China, 2021-2025 |
|
Thanks for your visiting 😊. Do not click this button!!! This website' source code is borrowed from Jonbarron. |